안녕하세요.호랑인입니다. LG 사랑의 다문화학교 캠프의 2학기 과정이 끝났습니다. 저번학기에 매우 바빴어서 포스팅을 못하고 있었는데, 이번에 짧게나마 준비 과정과 그 결과를 포스팅하기로 했습니다.
LG 사랑의 다문화 학교 2학기는 2019LG 사랑의 다문화학교 캠프의 2학기 과정이 끝났습니다. 저번학기에 매우 바빴어서 포스팅을 못하고 있었는데, 이번에 짧게나마 준비 과정과 그 결과를 포스팅하기로 했습니다.
LG 사랑의 다문화 학교 2학기는 2019년 11월 16일, 이화여자대학교에서 진행된 청소년 적정기술 경진대회에 실제로 출품해보는 것이 중점이 되었습니다. 이를 위해 카이스트에 재학 중인 외국인 학생들과 같이 살고 있는 나라에서 일어나고 있는 문제들을 공유하는 시간을 가졌고, 이를 바탕으로 각 팀마다 적정기술을 만들어 참가했습니다.
저는 이번에도 한 팀을 맡은 멘토로 참가하였습니다. 짧게 어떤 준비과정을 거쳤는지를 소개하겠습니다.
1. 외국인 학생과의 교류
인도의 Bihar에 살고 있는 사람들을 어떻게 하면 시원하게 해줄 수 있을지에 대해 고민해본 결과, 여러 아이디어가 나왔지만, Bihar 지역에 비가 많이 오는 관계로, 풍분한 수자원을 통해 에어컨과 비슷한 무언가를 만들 수 있지 않을까하는 아이디어가 나왔습니다.
하지만 우리가 주로 알고 있는 에어컨은 냉매를 사용하기 때문에 장비가 크고, 비싸며, 자가수리가 어렵다는 단점을 갖고 있었습니다. 하지만 적정기술은 싸고 간단하며, 자가수리가 쉬워야 한다는 제약 조건이 있었기에, 가장 간단하고 단순하게 에어컨을 만들 수 있는 방법에 대해 고민해보았습니다.
그러던 도중 생각난 것이 바로 펠티어 소자였습니다. 펠티어 소자는 전원을 공급하면, 양단에 온도차가 발생하는 소자입니다. 이 소자를 사용하여 에어컨을 만들어 보기로 했습니다.
4. 제품 제작 1
제품 제작을 위해 우선 펠티어 소자를 구매했습니다.
펠티어 소자의 모습
해당 펠티어 소자는 이름에서 알 수 있듯이, 양단에 12 V 까지의 전원을 공급해줄 경우, 양단에 70도의 온도차이가 생깁니다. 따라서 이에 12V를 구성해서 간의 에어컨(?) 을 만들었습니다.
5. 문제 발생 1
펠티어 소자의 가장 큰 문제가 발생했습니다. 바로 양단에 온도차이를 만들어 주는 것이 곧 냉각이 이뤄진다는 뜻은 아니라는 점이었습니다. 다른 말로 하자면, 처음에는 뜨거운 면의 온도가 실온과 비슷하기 때문에 반대측이 영하의 온도를 이루지만, 시간이 지남에 따라 소자의 발열로 인해 뜨거운 면의 온도가 올라가면, 차가운 면의 온도가 같이 올라간다는 것이었습니다. 수 분만 지나도 뜨거운 면의 온도가 100도 정도를 웃돌았고, 차가운 면의 온도가 30도 넘는 문제가 발생했습니다.
6. 문제 해결 1
이를 고치기 위해 냉각 블럭을 만들어 붙였습니다. 냉각 블럭에는 물이 펌프를 통해 들어갔고, 이 물은 열을 빼앗고 다시 나왔습니다. 이는 Bihar 지방에는 수자원이 많다는 점을 고려하여 진행된 것입니다.
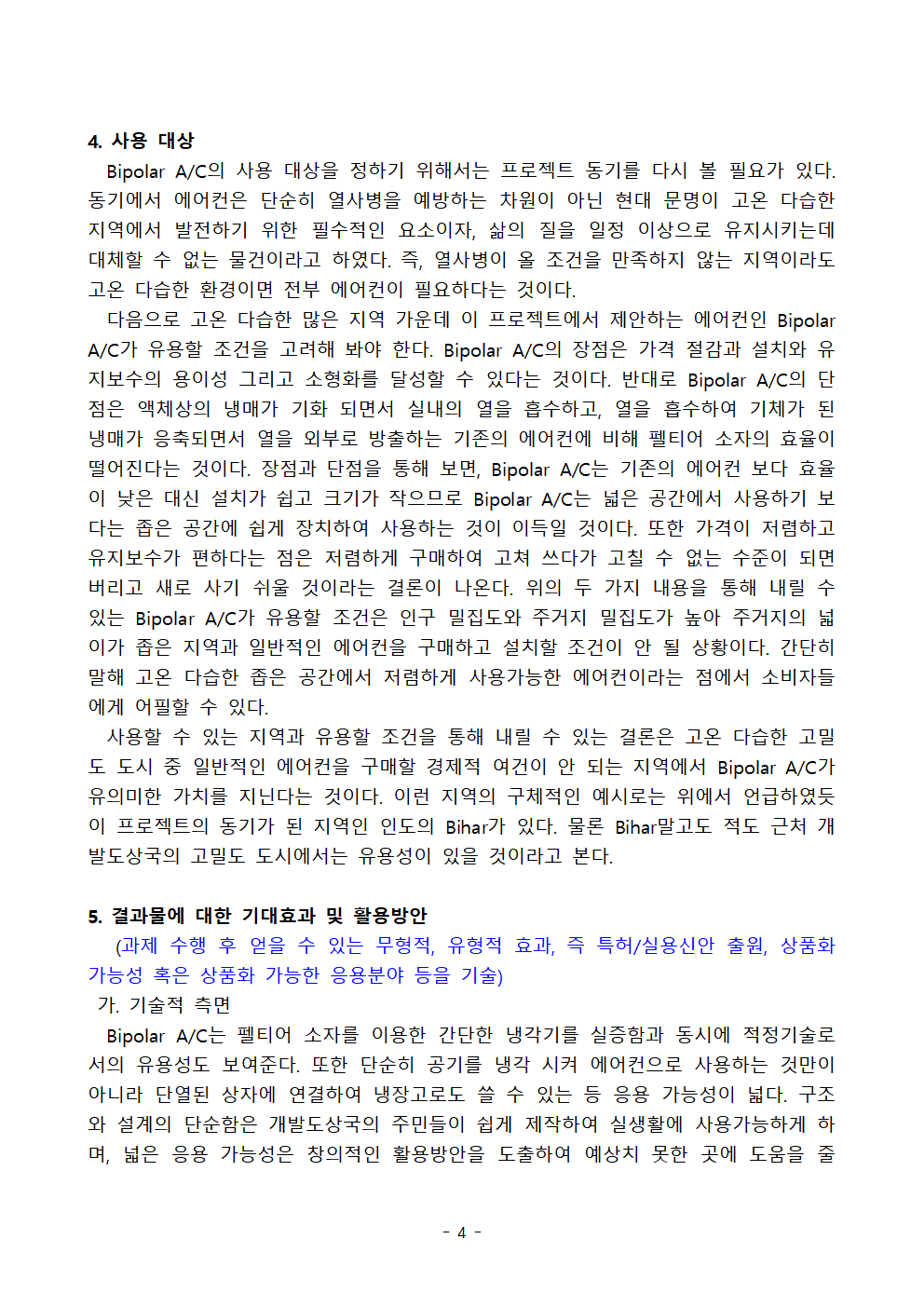
측면 모습
위의 사진을 보면, 냉각 블럭, 그리고 펠티어 소자, 열의 전달을 위해 표면적을 높여주는 방열판, 그리고 바람을 위한 전기 팬의 순서로 만들었습니다.
전체 모습
냉각블럭에는 새로운 물이 계속 들어가야 하기 때문에 이를 위해 물 펌프를 사용했습니다. 전체 구조는 위의 사진과 같습니다. 이 결과, 매우 시원한 바람이 팬을 통해 나오는 것을 확인할 수 있었습니다.
7. 문제 발생 2
문제는 물이 뜨거워진다는 점이었습니다. 계속 펠티어 소자의 열을 식혀준느 목적으로 사용되기 때문에, 물은 자연스럽게 뜨거워졌습니다. 이를 고치기 위한 방법이 필요했습니다.
8. 문제 해결 2
여기서 저희 팀은 발생의 전환을 했습니다. "뜨거운 물이 나오는 것이 진짜 단점일까?" 저희는 아닐 수도 있다 생각했습니다. 그래서 조사해본 결과, Bihar 지방에서 뜨거운물을 구하는 것도 어려운 일이라는 것을 알 수 있었습니다. 그래서 저희는 오히려 이 뜨거운 물을 활용할 수 있는 방법을 모색하기 시작했습니다.
저희가 생각한 것은 아래와 같습니다.
• 음식 조리
• 샤워 & 빨래
• 뜨거운 물이 필요한 다양한 실험
• 얼어있는 고기 해동
• 수영장 혹은 사우나
9. 추가적인 기능
추가적으로, 펠티어 소자는 그 특성 상 전원을 반대로 연결하면, 뜨거운 면과 차가운 면의 뒤집힙니다. 이를 활용하여, 별도의 스위치를 하나 설치하여 스위치를 통해 에어컨과 난방기 사이에서 선택할 수 있는 기능을 추가했습니다. 이를 부각하기 위해 제품의 이름은 Bipolar A/C 로 결정했습니다.
LG 5월 캠프는 "프로토타입 제작"을 해보는 캠프였습니다. 3, 4월 캠프 동안에 생각해보고 구체화했던 주제를 직접 만들어보는 시간을 가졌습니다.
<사전 준비>
개인적으로 아이들이 만들고 싶어하는 것의 완성도를 높일 수 있는 방법을 찾기 위해 많은 노력을 했습니다. 준비물도 미리미리 다음 시간에 발생할 수 있는 다양한 문제상황들에 대비해서 준비했고, 어플리케이션을 개발하고 싶어하는 아이들을 위해 어떤 프레임워크를 사용하는 것이 가장 좋을지를 선정하고 이에 따른 개발 환경을 노트북에 만들어 가는 등의 사전 준비가 많이 필요했던 캠프입니다. (실제로 개발환경을 만드는 것이 힘들어 캠프 전날 밤을 새서 노트북 2대의 셋팅을 끝내고 캠프에 참가하게 되었습니다.)
이번 캠프는 실질적인 제작이 메인 활동이었던 만큼, 각 부서별로 어떤 일을 진행했는지를 정리하기로 했습니다.
센서부는 오늘 Arduino를 사용해서 미세먼지 센서의 값을 읽는데에 성공했습니다. 다음 캠프에는 이 값을 블루투스를 통해 휴대폰에게 보낼 예정입니다.
3. 공기청정부
공기청정부는 보조배터리를 사용해서 노트북용 쿨러를 돌려보았습니다. 이를 위해 전선을 연결했습니다. 또한 쿨러와 마스크를 사용해서 미세먼지를 거를 수 있는 방법을 만들어 보았습니다.
4. 애플리케이션 부
이번 캠프의 가장 큰 업적은 어플리케이션을 만들어봤다는 것입니다. 저번 캠프 때 학생이 그렸었던 디자인 계획을 활용해서 어플리케이션을 만들었습니다. 우선, 다양한 얼굴 모양을 만들었습니다. 이를 하기 위해 Gimp 라는 프로그램을 사용했습니다. 본래 기하학적으로 만드려고 했으나, 학생들이 화면이 터치가 된다는 것을 활용해서 직접 손으로 아이콘을 전부 그렸습니다.
아이콘들을 모두 그린 뒤, React Native를 사용해서 앱을 제작했습니다. 아래에 해당하는 스크린샷을 첨부했습니다.
본래 처음 목표는 아두이노를 사용하여 방을 Mapping 하면서 공기 질의 분포를 정리하고, 가장 더러운 부분들을 돌아다니면서 청정을 하는 것이었는데, EV3 와 Arduino가 통신하도록 하는것이 불가능해보이지는 않으나, 생각보다 overhead 가 발생할 것 같아 아예 과감하게 구동부와 기타 다른 부를 분리하여 단순화하기로 마음먹었습니다.
그래서 구동부는 자체적인 Linetracer 를 만드는 것으로 그 목표가 바뀌게 되었습니다.
2. Linetracer 를 개발할 때 힘들었던 점
Linetracer 를 만들 때에 사용할 수 있는 센서로 EV3 에서 제공하는 컬러 센서가 있습니다. 이를 통해서 바닥의 색을 빨주노초검흰 등으로 분류할 수 있어, 이를 사용해서 track, 혹은 line 위로 잘 가고 있는지를 확인하면서 진행하는 프로그램을 작성하였습니다.
통상적인 linetracer 는 컬러 센서를 두개 갖고 있어, 왼쪽과 오른쪽이 각각 line을 벗어났는지 여부를 판단해주는데, 저희의 경우에는 컬러 센서가 하나 밖에 없었기 때문에 이를 최대한 활용하여 linetracer를 만드는 것을 목표로 삼게 되었습니다.
그래서 아래에서 설명할 알고리즘을 만들었고, 실제로 작동이 잘됨을 확인했습니다.
3. 알고리즘
3-1. line
우선, line은 검정색 단일색으로 설정했습니다. 이유는 저희가 line을 그릴 때 사용할 수 있는 마땅한 도구가 검은 사인팬 밖에 없었기 때문입니다. 바닥이 검정색일 수도 있다는 의견이 나와 다음 캠프 부터는 바닥 색으로 사용하지 않을 것이라 예상되는 빨강색을 line으로 사용하기로 결정했습니다.
3-2. IDLE
가장 먼저, 컬러센서가 검정색 선을 인지하고 있을 때에는 그냥 앞으로 진행하면 됐습니다. 다만, EV3 를 코딩하는데에 사용되는 블럭은 한 블럭당 앞으로 가는 각도를 설정할 수 있으며, 해당 각도만큼 진행하기 전에는 색을 탐지하는 블록으로 넘어기지 않기 때문에, 색을 꾸준히 확인하기 위해 한번에 앞으로 진행하는 각도를 작게 설정했습니다.
3-3. line을 벗어나는 경우
line을 벗어날 경우, 저희는 다시 line을 따라가도록 하기 위해 왼쪽으로 꺾어야할지, 오른쪽으로 꺾어야할지를 결정해야 합니다. 이를 위해선 원래 센서가 두개 필요하지만 (왼쪽과 오른쪽 중에서 어떤 방향이 line에서 벗어났는지를 확인하기 위해서) 저희는 그게 없기 때문에 아래의 방법을 사용했습니다.
우선 오른쪽으로 "조금" 회전합니다. 그 뒤에 검정색이 인식이 되면 그 방향이 맞는 것으므로 진행합니다. 하지만 그래도 검정색이 인식되지 않으면 왼쪽으로 회전했어야 하는 것이었기 때문에 왼쪽으로 아까의 2배만큼 왼쪽으로 회전합니다.
여기에서 "조금"의 정도는 "센서의 크기"와 앞서 앞으로 가는 부분에서 "앞으로 가는 최소단위" 두 개 중 더 큰 값으로 설정했습니다. 이것이 크면 불편하기 때문에 미리 아프올가는 최소 단위를 작게 설정해야 합니다.
3월 캠프를 시작으로 한 학기 + 여름방학 동안 저는 한 팀을 인솔하여 아이디어를 만들고 이를 구현하는 것을 돕습니다.
이번 LG 사랑의 다문화 학교의 큰 테마는 "똑똑한 로봇"입니다.
저는 멘토로서 저희 팀이 한 학기 동안 이 테마 아래에서 활동을 하게 될 것입니다.
LG 3월 캠프의 메인 주제는 "디자인 싱킹"이었는데요,
"디자인 싱킹" 이란 어떤 새로운 아이디어를 만들 때에 활용될 수 있는 아이디어 구상 전략입니다.
이러한 디자인 싱킹의 과정에 대하여 배웠으며, 실제로 실생활에서 문제점을 각 팀별로 찾아보고, 이를 디자인 싱킹의 과정을 통해 직접 해결해보는 시간을 가졌습니다.
저희 조는 실생활의 다양한 문제들 중에 "미세 먼지" 문제를 해결해보기로 했습니다.
하지만, 현재 공기 청정기는 이미 많은 회사들이 만들고 있었기에, 공기청정기를 보완할 수 있는 방법은 없을까 하고 생각하였습니다.
그 결과, 공기청정기는 그 위치가 고정되어 있어 같은 곳만을 청소할 수 있다는 문제점을 발견했고, 움직이면서 공기의 질을 감지하고 청소해 주는 로봇을 만들기로 했습니다.
저는 이 로봇을 4개의 큰 작동부로 나누기로 했습니다.
1. 구동부
구동부는 말 그대로 구동을 담당하는 부입니다. 로봇이 어떻게 움직일 것인지, 하드웨어는 물론 소프트웨어를 설계할 팀을 구동부로 정의했습니다. 구동부는 단순히 바퀴를 움직이는 것뿐만 아니라, 센서의 값을 사용해서 우리가 원하는 방향대로 움직이는 것이 중요할 것으로 보입니다.
2. 센서부
센서부는 짐작하실 수 있듯이, 현재 해당 위치의 미세먼지 밀도를 센싱 하는 부입니다. 센서를 연결할 회로를 설계하고, 값을 읽고, 이를 다른 부서들이 사용할 수 있도록 가공, 전달할 방법을 설계할 팀을 센서부로 정의했습니다.
3. 청정부
청정부는 센서부에서 받은 데이터 등을 활용하여 실제로 공기를 깨끗하게 만드는 하드웨어와 소프트웨어를 설계할 부서입니다.
4. 애플리케이션 부
이름에서 알 수 있듯이, 이 부서는 전체적인 총괄을 담당할 애플리케이션을 제작할 것입니다. 본래 제 계획에는 없었지만, 한 학생이 있었으면 좋을 것 같다 말하여 만들기로 했습니다. 센서의 값을 받아들여 이를 표기하고, 더 나아가 가능하면 구동 조작에 신호를 보내는 등의 기능도 만들면 좋을 것 같습니다.
이상 4개의 부서에 대한 소개를 마치겠습니다. 저는 이 뒤에 각 학생들이 당장 끌리는 부서를 정하게 했고, (겹쳐도 상관이 없다 했습니다.) 해당 부서에서 자신이 생각하는 완성품의 기능들과 외형에 대해 생각해보도록 했습니다.
아래는 아이들이 그린 아이디어 그림들입니다.
1. 구동부
구동부 1구동부 2구동부 3
2. 센서부
센서부는 그림으로 그리기 힘들 것 같아 저와 다양한 이야기를 해보는 것으로 마무리했습니다.